68-я Всероссийская научная конференция МФТИ
Список разделов ФАКТ - Секция перспективных технологий для систем безопасности
Основные направления секции:
- космические информационные системы
- связь, навигация и дистанционное зондирование
Контакты:ptsb@cniihm.ru
Формат проведения: очно
Дата и время проведения: 04.04.2026 в 9:30
Место проведения:ФГУП "ЦНИИХМ"
-

Синтез оптимальных линейных систем стабилизации
беспилотного летательного аппарата -

В работе рассматривается задача повышения точности управления управляющего двигателя-маховика (УДМ) в режимах удержания крутящего момента и угловой скорости при наличии внешних и внутренних возмущений. Актуальность обусловлена необходимостью снижения пульсаций механического момента и повышения точности стабилизации в системах ориентации космических аппаратов для выполнения более сложных космических миссий.
-

Исследование и моделирование кольцевого электродвигателя для подводных роботизированных систем
-
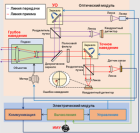
Работа посвящена оценке влияния точностиснаведения оптических межспутниковых терминалов на потери мощности сигнала в лазерной линии связи. Показано, что высокая энергетическая эффективность оптической связи достигается за счёт узкой диаграммы направленности, однако это приводит к требованиям к системе захвата, наведения и сопровождения. На основе дифракционного предела и гауссовой модели потерь получена зависимость между среднеквадратичной ошибкой наведения и допустимыми потерями мощности.
-

Алгоритмы комбинированной навигации на базе инерциальных, магнитометрических и гидроакустических датчиков
-

Рассматривается напряженно-деформированное состояние трехслойных панелей с сотовым заполнителем из композиционных материалов при наличии внутренних дефектов при действии ударной нагрузки
-

Проведение анализа маневров применяемых в околоземном космическом пространстве для инспекции
-

Целью работы является разработка алгоритма геометрической калибровки, минимизирующей неточность позиционирования звёздного датчика относительно проектора звёздного неба в составе испытательного стенда.
-

-

Алгоритм высокоточного управления АНПА повышенной маневренности
-

В данной работе для решения задачи корректировки орбиты только по угловым наблюдениям рассматривается метод Гаусса, который основан на получении начального приближения по трем угловым измерениям и организации итерационной процедуры, уточняющей это начальное приближение.
-
Результатом исследования является алгоритм, позволяющий выбирать такую ориентацию космического аппарата при инспекции космического объекта, которая обеспечивает максимальный энергоприход от солнечной батареи при условии отсутствия засветок звездного датчика.
-

Разработка алгоритма локальной подводной навигации АНПА по данным СТЗ для повышения точности позиционирования относительно протяженных объектов. Алгоритм комбинирует методы на основе глубокого мышления (нейросетевой классификатор) и классические методы обработки изображений (алгоритм Кэнни и преобразование Хафа).
-

В работе рассматривается задача повышения точности инерциальных измерений за счёт компенсации характерных для МЭМС-датчиков ошибок, .
Актуальность обоснована необходимостью улучшения качества измерений бюджетных БЧЭ при отсутствии паспортной информации о их погрешностях.
В работе предложен подход на основе алгоритма ANFIS, обучаемого по данным высокоточного эталонного БЧЭ. По результатам эксперимента точность измерений блока ADIS16467 была повышена на 32%.
-

Рассмотрены варианты повышения плотности компоновки системы массового запуска FPV квадрокоптеров с подвижных объектов.
-

Рассмотрено определение типа подстилающей поверхности на основе данных автомобильного радара с фазированной антенной решеткой. Результаты могут быть полезны для осуществления полета БЛА в условиях отсутствия сигналов спутниковых навигационных систем.
-

Работа посвящена повышению эффективности нейросетевой детекции объектов во встроенных системах безопасности при ограниченных вычислительных ресурсах и энергопотреблении. Показано, что режим реального времени достигается комплексной оптимизацией модели и организации обработки видеопотока, обеспечивающей приемлемый баланс точности и быстродействия при локальном выполнении.
-

Рассмотрено применение серийного радара-высотомера в качестве датчика для системы обхода препятствий безэкипажного катера.
-

В рамках приведенного исследования рассматривается проект навигационной системы, которая может быть использована в ситуации, когда конвенциональные средства навигации, такие как ГЛОНАСС, не доступны. В данной работе обсуждаются возможности навигации мобильной обсерватории в пределах поверхности Земли.
Предлагается привязать систему координат к пульсарам, получив естественный аналог ГЛОНАСС или GPS.
-
Анализ спектра электрохимического импеданса натриевых источников тока с помощью методов машинного обучения для выявления корреляции между состоянием заряда и представлением импеданса.
-

Систематизация задач машинного обучения, возникающих при анализе многомерных изображений, и сравнительный обзор архитектур нейронных сетей и метрик качества, применимых для их решения.