68-я Всероссийская научная конференция МФТИ
Список разделов ФРКТ - Секция интегрированных киберсистем
На секцию интегрированных киберсистем принимаются научные работы, посвященные проблемам управления в технических, организационных и социально-экономических системах.
Контакты: danialgad2002@gmail.com
Формат проведения: очный
Дата и время проведения: 01.04.2026 в 10:30
Место проведения: Москва, ул. Профсоюзная, 65, ауд.7 ( ИПУ РАН)
-

В настоящей работе исследуется работа самоосцилирующего усилителя класса D в качестве микрогрид инвертора напряжения. Построена иммитационная модель синхронизации инвертора в изолированном режиме и в режиме подключения к системе электроснабжения. Также, исследуется вопрос подавления нелинейных искажений напряжения, вызванный подключением нелинейной нагрузки. Проведено сравнение предложенного метода с существующими методами подавления нелинейных искажений напряжения в микрогрид системах.
-
Работа посвящена разработке и исследованию методов построения интерполяционных сплайнов с использованием линейной алгебры. Основное внимание уделяется задаче построения гладких функций, которые точно проходят через заданные точки и удовлетворяют условиям на значения самой функции, а также её первой и второй производных в узлах сетки. Предложенный подход основан на свойстве сопряженных базисов в конечномерных пространствах, что позволяет получать аналитические выражения для сплайнов в явном виде.
-

В работе рассматривается проблема рулевого управления складского вилочного робота погрузчика.
Целью исследования является разработка и техническая реализация опытного образца двухканального исполнительного модуля системы рулевого управления складского автоматизированного погрузчика -

Современные автоматизированные системы управления мобильными роботами широко применяются в разных задаяах. Несмотря на прогресс в автономии, в реальных сценариях ключевую роль сохраняет оператор, решение которого зависит от качества визуальной информации и уровня ситуационной осведомлённости (SA). В работе предложена интеграция трёх компонентов: панорамного захвата, семантического анализа видеопотока и иммерсивного интерфейса оператора для повышения эффективности управления мобильным роботом.
-

Рассматривается задача индексации темпоральных графов для эффективных запросов временной достижимости. Предлагается гибридная структура данных, разделяющая вершины на два типа в зависимости от объёма информации о достижимости. Строится аналитическая модель распределения типов вершин при предположении степенного распределения степеней. Получены оценки памяти и времени запросов как функций порога промоции, доказано существование единственного оптимального значения порога.
-

Работа посвящена разработке и экспериментальной верификации автономной системы управления гусеничным транспортом для движения по пересечённой местности без внешнего управления и спутниковой навигации. Рассмотрены метод агрегации разнородных измерений и модульный подход к разработке алгоритмов. Показана работоспособность комплекса и достигнута точность перемещения порядка 5 м на 1 км на слабо пересечённой местности.
-

Разработан виртуальный датчик температуры постоянных магнитов синхронного двигателя (PMSM), предназначенный для мониторинга теплового состояния ротора без установки физических датчиков. Рассмотрены наблюдатель потока, ML-подход и гибридный алгоритм на основе оценки потокосцепления. Проведена верификация на цифровом двойнике и экспериментальном стенде. Достигнута погрешность оценки до ±1,7 °C. Решение ориентировано на применение в системах векторного управления.
-

В работе представлен обзор методов непрерывного вейвлет-преобразования (CWT) для анализа неэквидистантных временных рядов. Выделено четыре класса алгоритмов: интерполяция, численное интегрирование, регрессионные методы и адаптация базиса. Проведен сравнительный анализ их вычислительной сложности и точности. Выявлено, что ключевой проблемой всех методов остается обработка длительных разрывов в данных, что определяет перспективность разработки статистически обоснованных алгоритмов CWT.
-

Оценивание сложности изображений востребовано в различных областях науки и техники. В свою очередь, в силу отсутствия общепринятого формального определения, измерение сложности изображений до сих пор является открытым вопросом. В настоящем докладе предпринимается попытка ввести в рассмотрение иерархию нескольких согласованных уровней, на которых формулируются вопросы оценивания сложности изображений.
-
Предложена схема интегрированного позиционирования по данным IMU и ГНСС на основе квадратнокорневого расширенного фильтра Калмана (SR-EKF) с 16-компонентным вектором состояния. При деградации ГНСС-сигнала коррекция курса автоматически отключается по метрике RMS, оценка удерживается инерциальным прогнозом. Схема апробирована на реальных данных движения катера с проездами под мостами и показала устойчивость позиционного решения в условиях затенения.
-

В работе исследуется применение обучения с подкреплением для повышения точности управления синхронным двигателем с постоянными магнитами (PMSM) при расхождении параметров реального двигателя и расчётной модели в классическом FOC. Проведено моделирование переходных процессов с учётом ограничений инвертора и нелинейностей магнитной системы, выполнено сравнение с FOC. Показано, что RL-агент обеспечивает более быстрое достижение заданного момента при сохранении ограничений.
-

В работе предлагается использовать двухуровневый подход к моделированию (детальный и агрегированный) для решения крупномасштабной задачи многозаводского планирования ВИНК. Также обосновывается применение принципов "5А" и роли координатора для создания саморегулирующейся системы планирвоания. В качестве инструмента оценки планов прделагается АСФ. Кроме того, предложено использование показателя рентабельности в качестве критерия оптимизации.
-

Для успешного функционирования систем управления техпроцессами на основе APC необходимо наличие точной и быстродействующей математической модели динамического поведения управляемого объекта. В настоящей работе на примере нефтеперерабатывающей отрасли предложена методика для ускорения процесса интегрирования уравнений динамики системы получаемой модели с сохранением приемлемой точности.
-

Работа исследует способ упрощения задачи коммивояжёра через разбиение её на более простые геометрические подзадачи. Предлагается триангуляция точек и кластеризация, выделяющая конфигурации, близкие к полиномиальным случаям. Локальные решения затем объединяются, а качество разбиения оценивается методом попарного сходства. Цель — снизить вычислительную сложность и повысить качество итогового маршрута.
-

В работе предложена и описана методика расчета факельной сети трубопроводов. Данная методика использует адекватную модель факельной сети, модифицированный метод Ньютона для расчета уравнений, а также некоторые эвристики для улучшения скорости сходимости и стабильности итерационного процесса при сохранении точности расчета.
-

В работе представлена разработка методики компьтерного обучения операторов технологических процессов (ТП) распознаванию аномальных состояний на примере процессов, протекающих в печи блока предварительной ректификации атмосферно-трубчатой установки. Цель работы - создание прототипа автоматизированной системы формирования у операторов навыка быстрого и точного выявления отклонений в ТП через сопоставление различных состояний процесса.
-

В работе рассматривается разработка системы управления гуманоидного робота booster K1 на основе кинематического ретаргетинга движений человека. Предлагаемый подход использует методы компьютерного зрения для оценки скелетной модели оператора по данным монокулярной камеры в реальном времени. На основе полученных координат суставов вычисляются углы сочленения верхних конечностей и их преобразование в команды управления рук робота с учетом различий в пропорциях и кинематике оператора и робота.
-
Задача двухэтапного голосования является примером NP-полной задачи.
В работе предлагается простейший пример жадного алгоритма для этой задачи и его границы применимости. Также вводится геометрический подход к этой задаче в рамках которого, как хочется надеяться, получится некоторое ускорение полного перебора при решении.
-

В работе систематически исследуется влияние длительности тестового импульса тока и фазы релаксации на точность идентификации параметров эквивалентных схем литий-ионных аккумуляторов. Показано, что оптимальный выбор параметров импульса позволяет существенно повысить точность моделирования напряжения.
-
В работе изучена возможность нейросетевых моделей аппроксимировать одноточечное перспективное преобразование с отклоняющимся вектором наблюдателя и развёрнутой картинной плоскостью. Для двух архитектур нейросетей проанализированы статистики относительных ошибок. Установлено, что нейросетевые модели весьма хорошо решают данную задачу. Это создаёт предпосылки для исследования возможностей нейросетевых алгоритмов решать обратные задачи перспективного преобразования в указанной постановке.
-

В работе исследуется кластеризация исследователей алгоритмами k-среднего и Лувена на основе четырех гипотез сходства авторов.
-
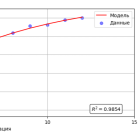
В работе проводится параллель между задачами управления тренировочным процессом в социально-экономических системах и закономерностями формирования опыта, описываемыми математическими моделями научения. На примере данных соревнований по плаванию показано, что динамика улучшения результатов с высокой точностью аппроксимируется экспоненциальной кривой научения, что свидетельствует о схожих закономерностях формирования как простых моторных, так и сложных спортивных навыков.
-

Исследована робастность 27 алгоритмов машинного обучения для оценки состояния заряженности (SoC) литий-ионных аккумуляторов в условиях зашумления. Модели тестировались на данных с гауссовским шумом (10–50 %) и систематическим смещением (0–5 %) к базовому уровню шума. Нейросети показали ухудшение по MAE на 13–28 % при максимальном шуме. Бустинги наиболее робастны: ухудшение лишь на 0,5–1,2 % при 50 % шуме и 5 % смещении, что делает их предпочтительнее для встраиваемых BMS.