67-я Всероссийская научная конференция МФТИ
Список разделов ФРКТ - Секция интеллектуальных методов и систем управления, обработки и защиты информации
Секция интеллектуальных методов и систем управления, обработки и защиты информации принимает доклады посвященные системам цифрового автоматического управления, системам и алгоритмам обработки высокоскоростных потоков информации, системам управления в телекоммуникациях, транспорте, логистике и экономике, нейросетевым алгоритмам, генетическим алгоритмам и ant systems, специальным разработкам в области защиты информации.
Формат проведения: оффлайн
Дата и время проведения: 01.04.2025 в 11:00
Место проведения: Москва, Ленинский пр-т, 51, конф.зал (ИТМиВТ)
-

Постановка задачи заключается в том, чтобы разработать качественного ассистента для ресторана быстрого обслуживания. Сервис должен поддерживать формирование заказа клиентом с голоса без отображения информации на экране. Новизна решения заключается в том, что необходимо реализовать сервис для сети ресторанов, не имея базы знаний необходимого размера и качества.
-
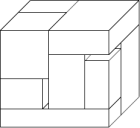
Задачей исследования является оценка оптимального количества роботов на полностью роботизированном складе. Объект исследования – склад, обслуживаемый роем рельсовых роботов – шаттлов (bot) и состоящего из N сегментов, каждый из которых содержит Nc=10 каналов хранения коробок.
-

Исследуется метод повышения точности инерциальных навигационных системах использующих кластеры МЭМС-датчиков. Несмотря на преимущества МЭМС, их высокий уровень шумов ограничивает точность. Предлагается объединить данные с нескольких датчиков из кластера через алгоритмы комплексирования, что позволит снизить шумы и тем самым повысить точность измерений. Рассматривается потенциал такого подхода для создания пригодных для авиации и робототехники доступных инерциальных навигационных систем.
-

Воспроизведение цифровой копии fisheye event-based камеры в редакторе Unigine 2. Анализ области применимости данной подификации применительно к БПЛА в задачах уклонения от препятствий.
-

Моделирование системы включающей в себя:
1. Эволюцию популяции.
2. Половое и бесполое размножение.
3. Смену времён года и различную плодородность почв. -

Настольная игра — хороший метод провести время с пользой и удовольствием в компании друзей или семьи. Мы хотим придумать некоторую настольную игру, имитирующую процесс управления роботом-сортировщиком почты в складе. Вариантов правил игры много и и нам нужно выбрать среди них наиболее подходящий вариант, чтобы игра была сбалансированной и происходила в течение определенного периода времени. Для этого нам понадобится моделирование.
-

Получение цветных изображений в цифровых видеокамерах, как правило, производится на основе использования байеровского фильтра. Однако, при использовании этого фильтра, качество полученного изображения снижается по сравнению с черно-белым изображением. Для избежания потери качества изображения предложено формировать цветное изображения высокого разрешения на основе черно-белого изображения высокого разрешения путем раскрашивания методами глубокого обучения.
-

Типичной задачей современных систем поддержки принятия решений является задача анализа большого количества фактов и утверждений, задаваемых в простой текстовой форме. Одной из самых известных задач такого рода является так задача, известная в литературе, как Zebra Puzzle, Нами проанализирован подход к применению LLM к решению этой задачи в обобщенном виде
-

Предложеная система для безмаркерного захвата движений кисти на основе ToF и RGB камер , обеспечивающих построение 3D-скелета кисти. Цель работы – создание автоматизированного решения для анализа движений кисти без использования маркеров. Система может применяться в медицинской реабилитации для оценки восстановления двигательных функций, в спортивной аналитике для анализа техники и в областях, связанных с человеко-машинным взаимодействием.
-
В данном исследовании предложена система захвата движений, использующая глубинную (ToF) и высокоразрешающую цветную камеру. Цель – создать автоматизированную платформу для анализа движений без необходимости установки маркеров на теле пользователя. Данная технология может применяться для реабилитации, контроля физических упражнений и анализа биомеханики движений
-

Разрабатываемая система предназначена для захвата и анализа траекторий велосипедистов при движении по велотреку, предоставляя ценные данные для анализа их результатов. В частности, интерес представляет линия движения по треку, мгновенная скорость, а также динамика угла наклона велосипеда. Полученные данные будут в дальнейшем использованы тренерами для анализа и улучшения результатов в дисциплине “гит на 200 метров”.
-
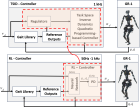
Исследование сравнивает методы Task-Space Inverse Dynamics (TSID) и обучения с подкреплением (RL) для управления локомоцией бипедального робота. TSID требует точного моделирования динамики, в то время как RL обеспечивает адаптивность без явного моделирования. Оценены эффективность и стабильность обоих методов, а также предложены направления для дальнейших исследований.