67-я Всероссийская научная конференция МФТИ
Список разделов ФПМИ - Секция динамики и управления движением космических аппаратов
Секция посвящена динамике и управления движениям космических аппаратов
Формат проведения: онлайн
Дата и время проведения: 31.03.2025 с 11.00
Место проведения: конференц-зал ИПМ им. М.В.Келдыша РАН (г. Москва, Миусская площадь, д.4)
-

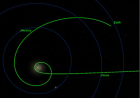
Целью работы является проектирование многовитковых околоземных траекторий межорбитальных перелётов космических аппаратов с малой тягой. Траектории проектируются на основе метода Ляпунова с использованием сглаживающей функции, называемой «сигмоида». В качестве аргумента в сигмоиду входит коэффициент эффективности тяги (КЭТ). Численное моделирование осуществляется при помощи непосредственного расчёта КЭТ и с использованием аналитической оценки КЭТ снизу, полученной в работе.
-

В данной работе рассматривается задача корректной обработки измерений датчика угловой скорости (ДУС) и двух магнитометров с бортового компьютера КА «TUSUR GO» с помощью расширенного кинематического и динамического фильтра Калмана, после чего предлагается проанализировать полученные результаты на основании данных о движении КА.
-

В работе представлена методика построения энергетически оптимальных траекторий перелета к околоземным астероидам с ЭРДУ при помощи эффектов задачи трёх тел. Оптимальное управление рассчитывается на основе принципа максимума Понтрягина. В качестве опорных траекторий используются орбиты Ляпунова точки либрации L1, с которых осуществляется переход на круговые гелиоцентрические орбиты семейства C1.
-
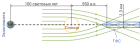
Рассматривается задача автономного управления космическим аппаратом, находящимся в области фокуса гравитационной линзы Солнца, с использованием методов обучения с подкреплением. Задача рассматривается в двух постановках: сначала предполагается, что на аппарат не действуют никакие внешние силы, за исключением реактивных сил от двигателей, далее задача усложняется учётом движений Солнца и экзопланеты. С помощью алгоритма PPO было проведено обучение агента и собрана статистика.
-
Миссии типа Sundiver для КА с солнечным парусом предполагают близкий пролёт Солнца для выхода на гиперболическую траекторию за счёт комбинации эффекта Оберта и высокого светового давления. В данной работе изучается зависимость гиперболического избытка скорости космического аппарата от параметров паруса и траектории разгона. Используется модель неидеального солнечного паруса, а задача упрощается за счёт рассмотрения обратной во времени задачи.
-

В работе моделируется спутниковое созвездие, рассматриваются различные варианты межспутникового взаимодействия (а также другие параметры системы). Предложен критерий оценки качества связи. Проведено численное моделирование, исследовано измение качества связи в зависимости от варианта межспутникового взаимодействия.
-

В данном исследовании рассматривается проблема разгрузки маховиков космического аппарата без использования топлива в режиме наведения на Солнце. Один из эффективных подходов заключается во вращении вокруг вектора тяги, что позволяет усреднять возмущающие моменты и снижать их влияние на насыщение маховиков.
-

В работе рассматривается задача управления движением группы спутников на околоземной орбите для формирования заданной относительной конфигурации. Алгоритм управления построен на основе прямого метода Ляпунова с использованием криволинейных относительных координат. В работе проводится исследование времени сходимости и точности поддержания требуемого движения с учётом ограничений на величину управляющего ускорения и под влиянием второй зональной гармоники геопотенциала.
-

В работе рассматривается задача управления относительным орбитальным движением многоспутниковой системы с ограничениями на межспутниковое взаимодействие устойчивая к возможным отказам агентов системы. Предлагаемая методика управления базируется на представлении системы в виде ориентированного графа и сводит к нулю относительный дрейф группы спутников, при наличии лидера. Для обеспечения наличия лидера используется, адаптированный на случай динамической системы, алгоритм Raft.
-

Рассматривается межпланетный перелёт малого космического аппарата с идеально регулируемой электрореактивной двигательной установкой между компланарными круговыми орбитами. С помощью принципа максимума Понтрягина задача оптимизации сводится к краевой задаче. Далее находится множество оптимальных траекторий с разным временем перелёта. Параметры оптимального управления принципа максимума, а также время перелёта аппроксимируются методом символьной регрессии.
-

В работе исследуются параметры орбитального построения для группировок связи для обеспечения глобального покрытия связи с учетом ограничений межспутниковой связи и предотвращения опасных сближений. Предложен комбинированный геометрический метод для расчета орбит, учитывающий разлчиные требования. На основе вычисленных параметров определяются размеры слотов, задающие допустимые смещения спутников в рамках орбитальной структуры.
-

В настоящей работе исследуется методология обработки данных космического эксперимента на Российском сегменте Международной космической станции (МКС), в рамках которого изучается движение свободно движущегося тела в герметичном отсеке МКС. Во время эксперимента движение тела снимается набором камер, закреплённых на корпусе внутри МКС. Анализ траектории тела основан на видеоизображении.
-

Рассматривается КА с крупногабаритными нежёсткими элементами (КНЭК), прикреплённых к его корпусу, возбуждающих колебательное движение, усложняющее движение КА. В работе рассматривается алгоритм выбора такого управления, которое сводит возбуждаемые колебания к минимуму.